
Base de un robot móvil
Un robot móvil puede ser definido como “Un sistema electromecánico capaz de desplazarse de forma autónoma sin la necesidad de estar sujeto a un punto físico”. Los robots móviles poseen sensores que les permiten monitorear su posición a cada momento refiriéndonos a su punto de partida y su punto de destino, su control es normalmente en lazo cerrado y su desplazamiento se debe gracias a dispositivos de locomoción con los que cuenta tales como: ruedas y patas.
Los robots móviles en su mayoría poseen características distintivas que los hacen aptos para la tarea que están destinados a realizar. Esta tarea es la principal para determinar la particularidad de la estructura de este (tipo de ruedas, sistema de tracción y dirección y su forma física).
Es importante mencionar que este robot fue diseñado de tal manera que cada uno de los elementos sean analizados de forma independiente y posteriormente son integrados en un solo dispositivo.
Para este robot también se tienen los modelos de llantas omnidireccionales, que son aquellas que permiten poder dar una movilidad en cualquier dirección al robot diseñado.
Para el primer prototipo se realizó impresión 3D, para determinar el funcionamiento del mismo, este proceso se puede ver en la fig. 1.
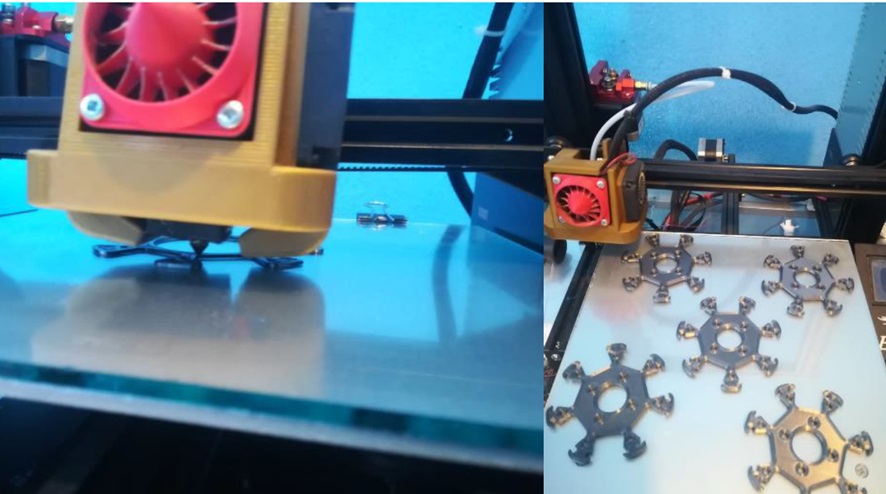
Fig. 1.- Impresión 3D del primer prototipo, en esta figura se puede ver la impresión de las llantas omnidireccionales.
En la figura 2, se puede ver el diseño en CAD de la rueda omnidireccional, la misma que posteriormente será impresa en 3D.
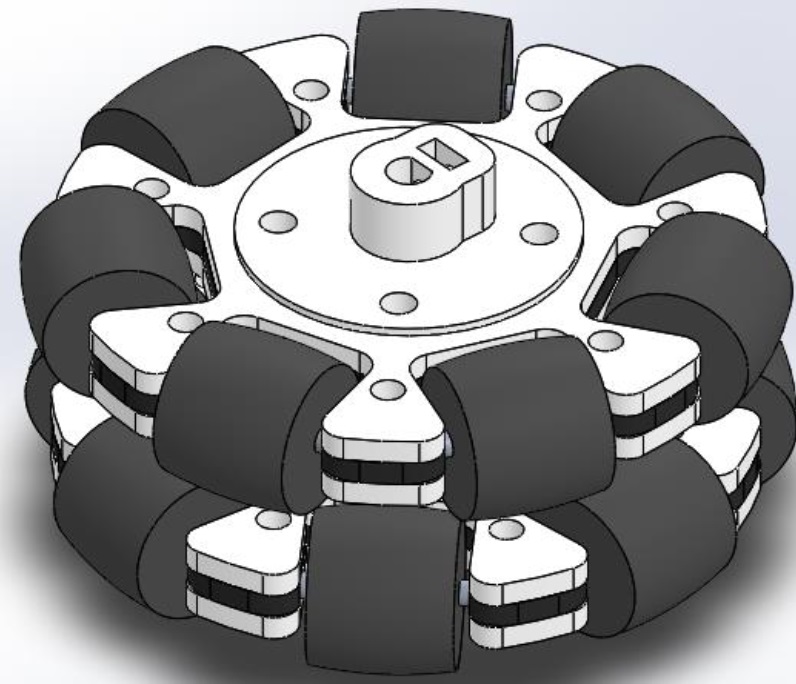
Fig. 2.- Figura en CAD de la rueda omnidireccional diseñada, esta contiene diferentes artes que se integran para generar el modelo mostrado.
En las Figuras 3 y 4 se puede observar el diseño del robot después de haber sido impreso y ensamblado.
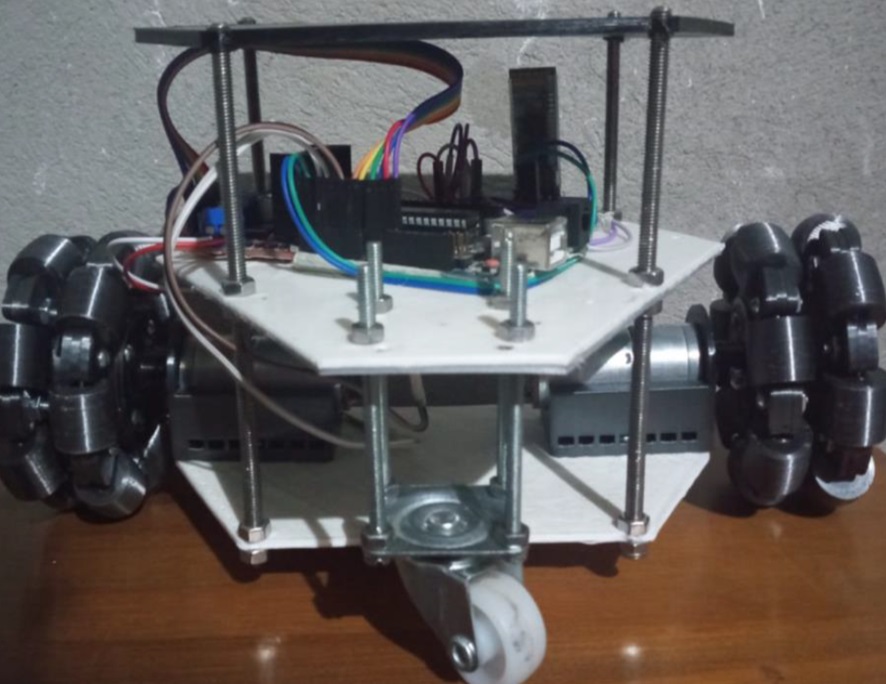
Fig. 3.- Ensamble del robot móvil.
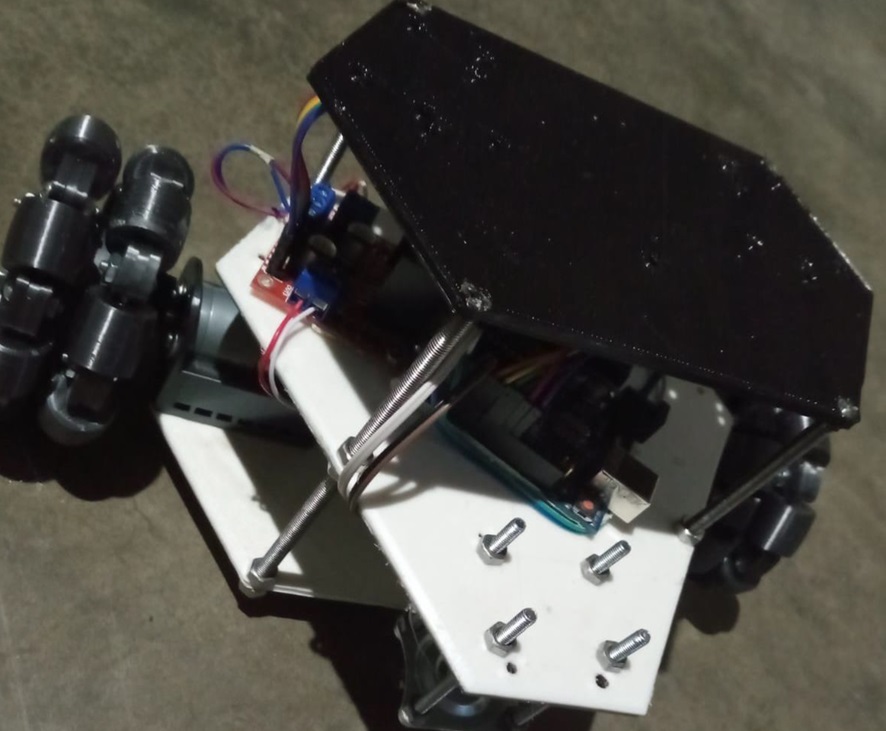
Fig. 4.- Ensamble del robot móvil, con una perspectiva diferente a la figura 3.
Para el control de motores e ha utilizado la configuración mostrada en la figura 5.
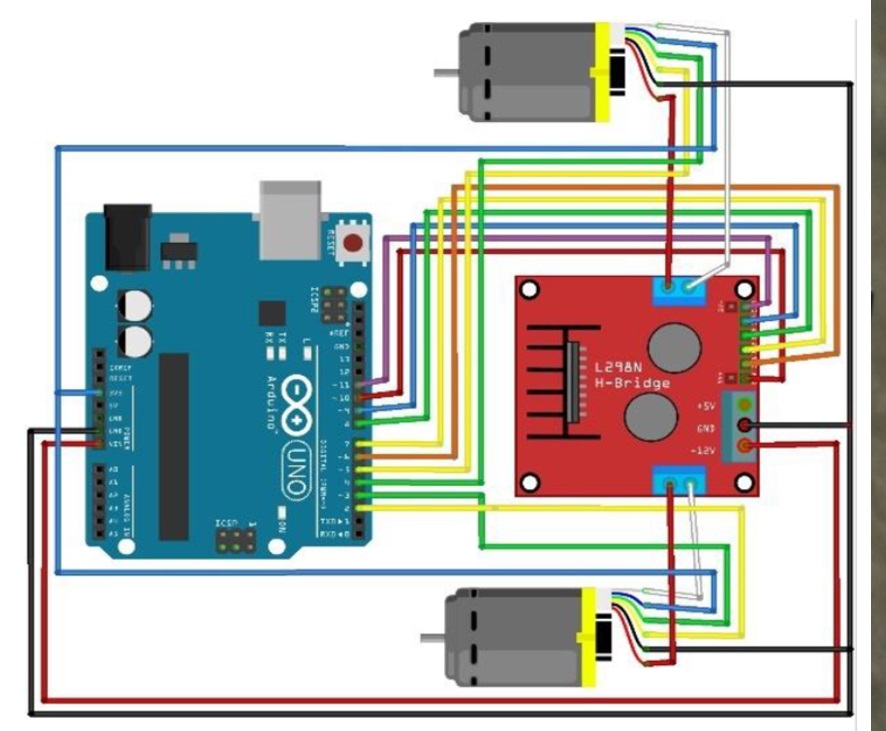
Fig. 5.- Control de motores del robot móvil, se puede ver el uso del control denominado Puente H, para dotar de mayor potencia a las máquinas.
Es muy importante mencionar que este modelo se ha realizado con la intención de generar una base de aprendizaje, este modelo ya cuenta con las características necesarias de diseño para ser considerado un robot móvil correcto, por lo que cualquier usuario puede descargar la información y partir de él para generar sus propios proyectos.
En los siguinetes links de descarga mostrados a continuación se tienen los archivos base para la impresión del modelo y para la impresión de las llantas omnidireccionales.

Proyecto apoyado po el PAPIIT IA102323 y PAPIME PE104224.