
RESUMEN
Existen diversas aplicaciones en las cuales es necesario que un vehículo genere sus movimientos de una forma autónoma, aplicaciones que van desde sistemas que puedan salir de un laberinto sin necesidad de estar tocando los muros, hasta sistemas más complejos que pueden ser utilizados como vehículos de rescate o de exploración.
Generalmente, este tipo de vehículos se programan en forma de condicional-respuesta, es decir, si se presenta una situación definida, se obtiene una respuesta definida. Este tipo de estructura provoca un funcionamiento no natural y rígido, y puede provocar malfuncionamiento al encontrarse en una situación no definida en su software, sin embargo, por medio de un controlador difuso, el comportamiento del robot puede llevarse de una forma más natural, sin esos cambios rígidos en los movimientos. Esto puede verse en la figura 1.
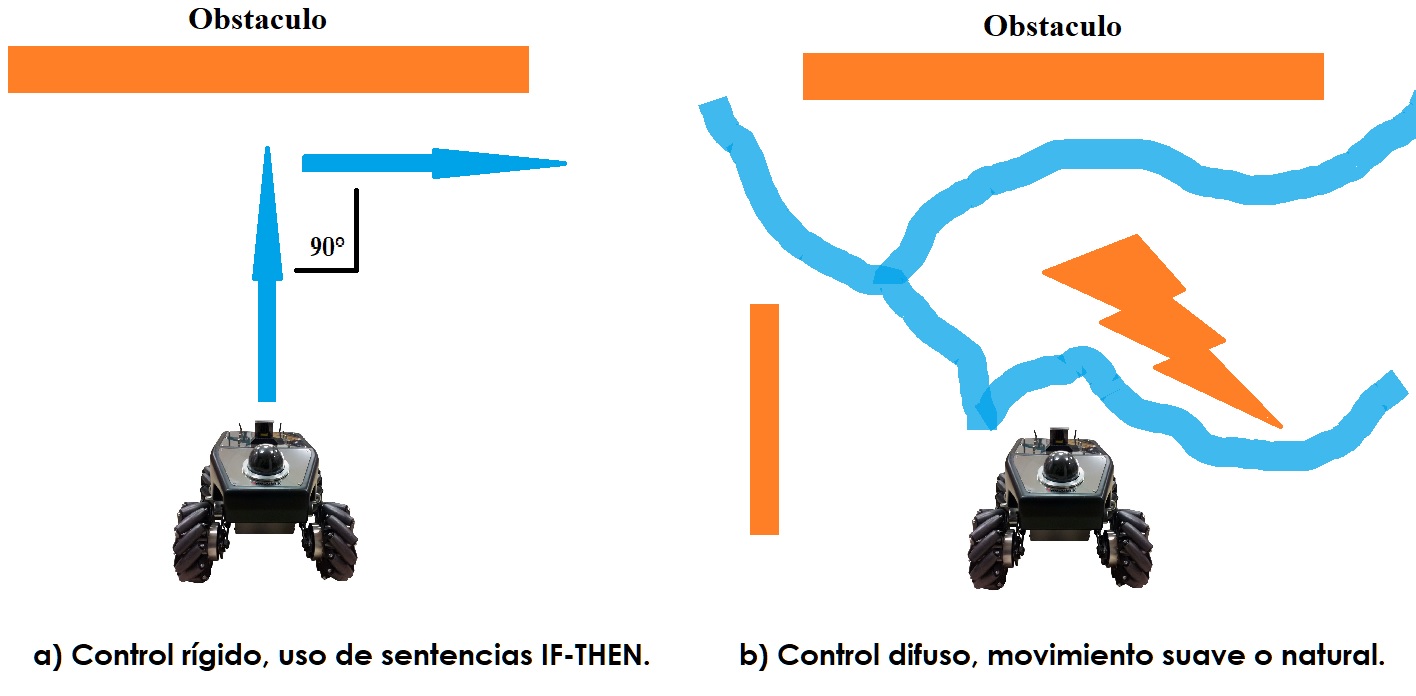
Fig. 1.- Comparativo de movimientos de un vehículo utilizando dos diferentes tipos de control, en el a) se utiliza un control estándar , que genera cambios de dirección rígida (en 90 grados), por el otro lado, el controlador difuso presenta cambios de dirección suaves, basados en el análisis del entorno. Las líneas anaranjadas representan obstáculos, mientras que las líneas azules representan la forma en la que el robot se puede desplazar.
En este proyecto, se diseña un vehículo autónomo, auto controlado de forma inteligente mediante un controlador difuso realizado por medio de Fuzzy logic toolbox de Matlab. El vehículo identifica las características del entorno, los obstáculos y los ángulos en los cuales se encuentra el obstáculo, y en base a
esos datos, decide cual es la mejor dirección a seguir, y el ángulo apropiado que debe girar para poder fluir en la dirección calculada. Este sistema tiene la particularidad, que su movimiento se presenta de forma natural, es decir, puede girar en cualquier dirección y en cualquier ángulo dependiendo de las variables de entrada. Todo diseñado con elementos de bajo costo económico.
EL controlador difuso generado en este proyecto puede ser implementado en cualquier sistema móvil que necesite desplazarse con autonomía, lo que le proporciona dinamismo a nuestra propuesta.