
Robot diseñado para montar diferentes estructuras electrónicas
Se diseñó una base para robots que presenta características de un vehículo móvil, con un brazo robótico que ayudará en diversas tareas.
La idea de esta base robótica es el que se pueda utilizar para diferentes fines y no solo para una aplicación, es decir, tiene características para utilizar sistemas de movilidad, de visión artificial y de recolección. Adicionalmente, esta pensado para poder cargar con diferentes tipos de dispositivos como sensores, actuadores, placas de desarrollo, entre otros elementos, sin que altere el funcionamiento del vehículo.
Se dejan los archivos de diseño, para que cualquier usuario pueda obtenerlos y utilizar esta base robótica para realizar cualquier proyecto requerido.
Se hace la mención que, aunque los archivos serán libres de uso, sí debe de existir una referencia hacía la página donde se esta descargando, así como la autoría.
A continuación, se muestran diferentes vistas del vehículo. Este diseño se realizó como parte del PAPIME PE103223.
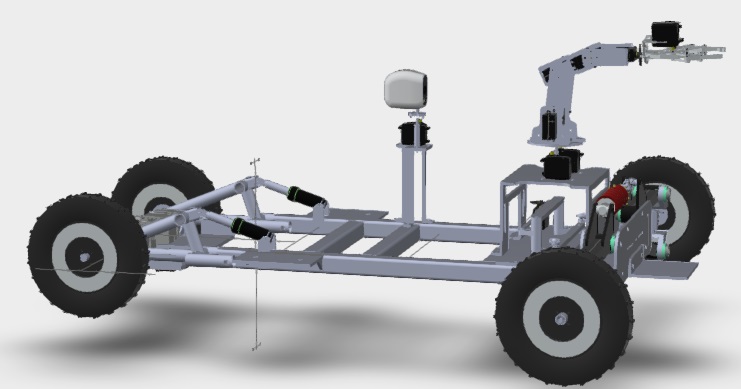
Fig 1.- Visión lateral del vehículo, se puede observar que contiene un montaje para camára, así como un brazo robotico para poder agarrar diferentes objetos.
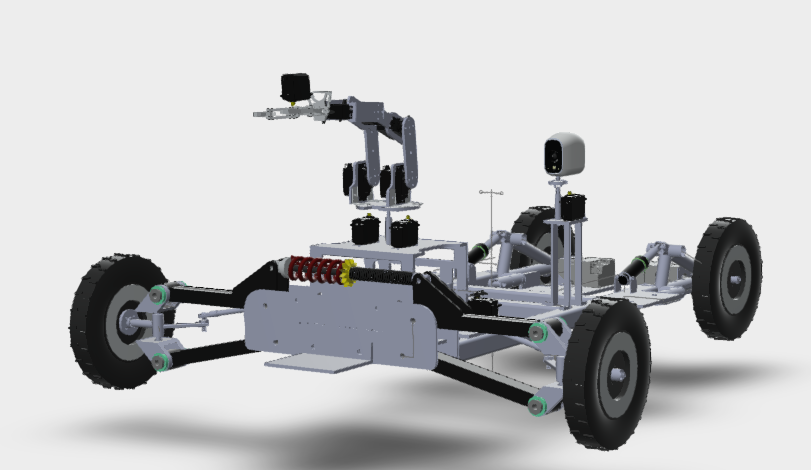
Fig. 2.- Vista frontal isométrica, donde se apreci el mecanismo de las llantas .
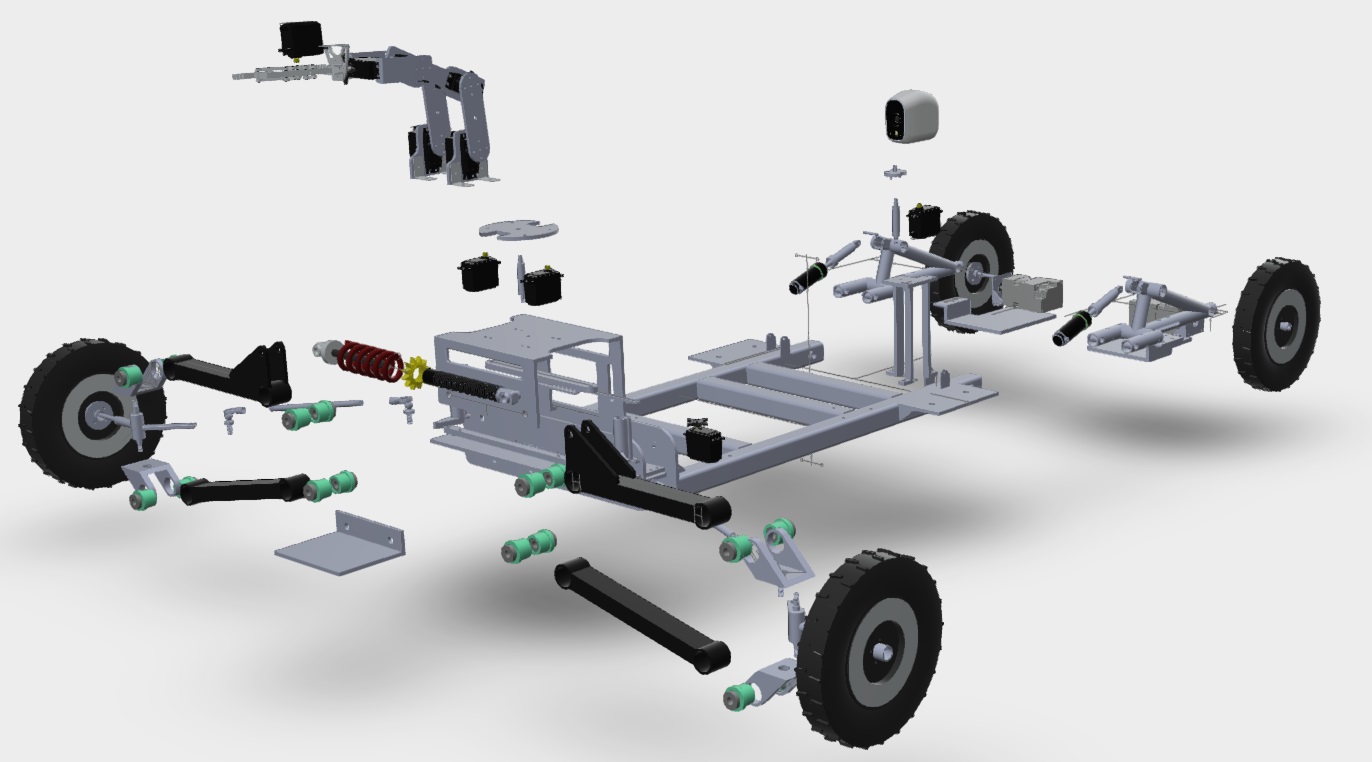
Fig 3.- Isomértico en donde se ve la descomposición de las piezas del vehículo.
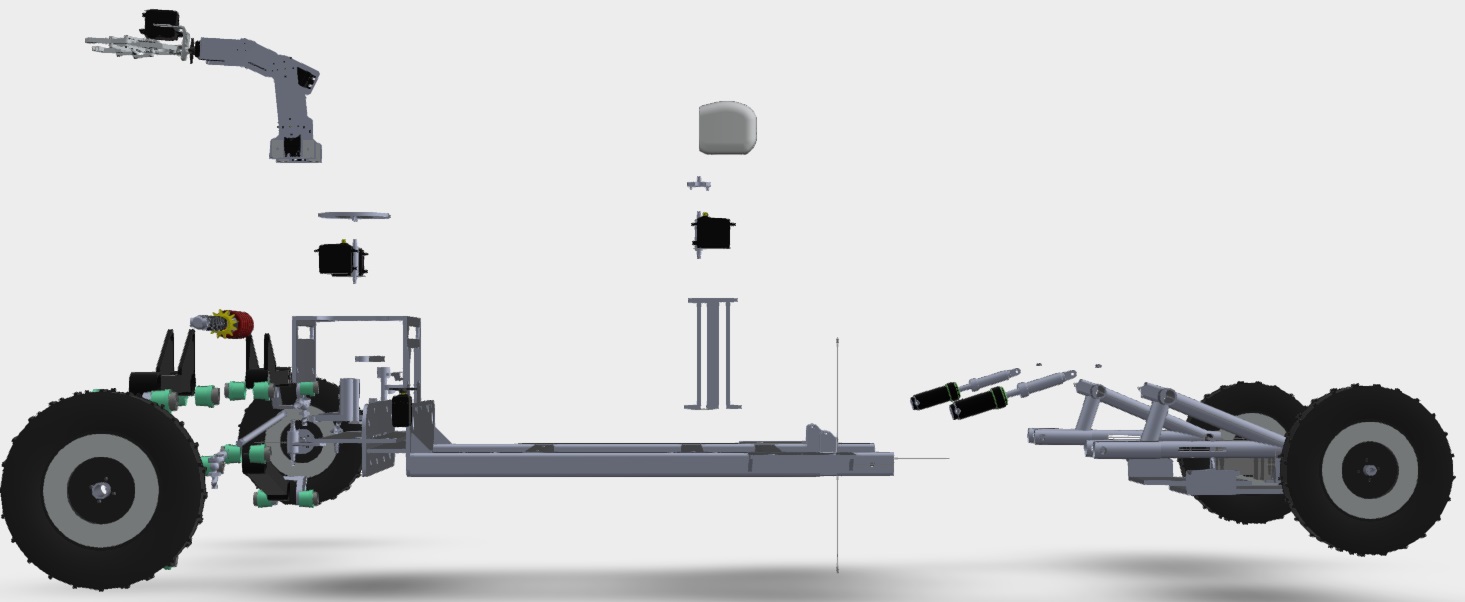
Fig4.- Isométrico lateral donde se ve la descomposición de las piezas.
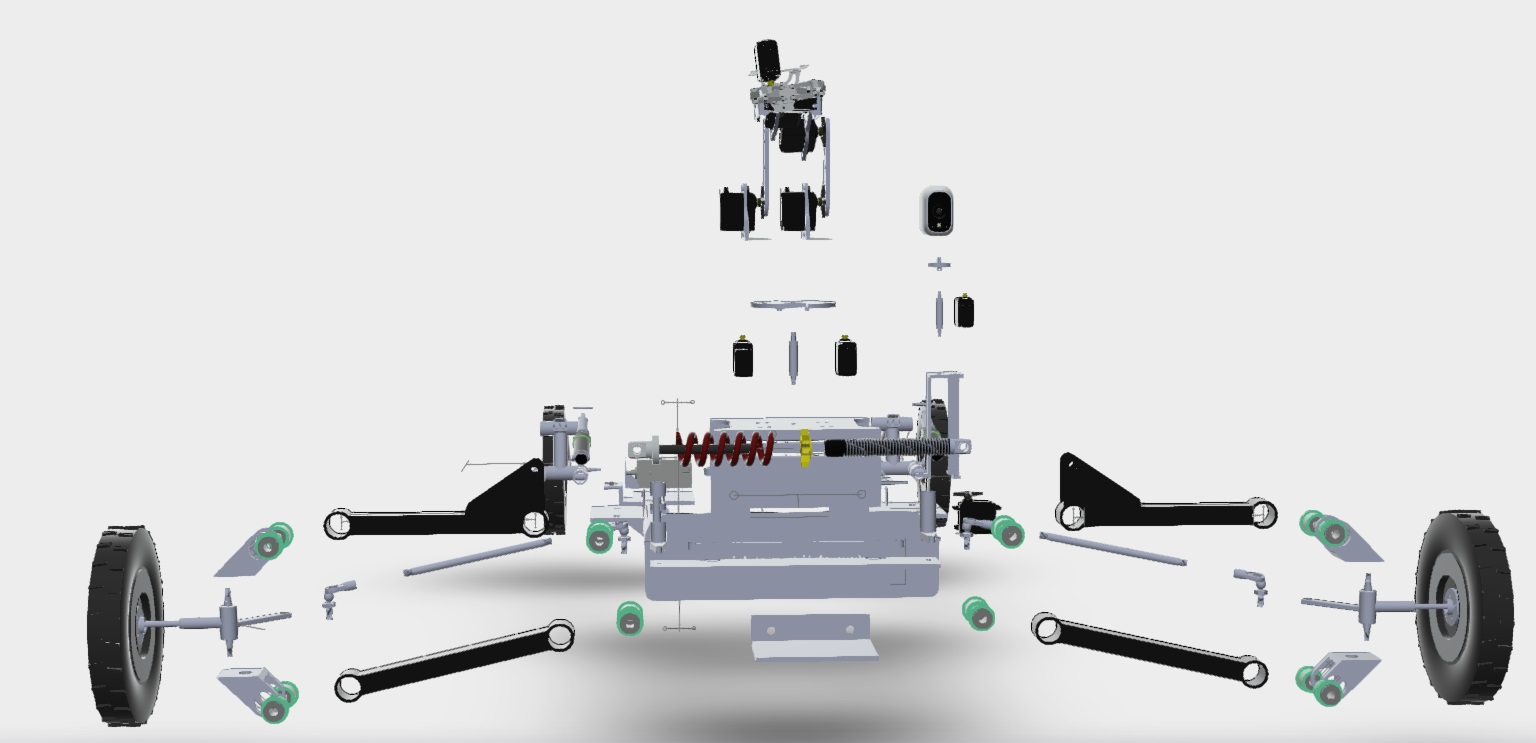
Fig. 5.- Vista de frente donde se ve la descomposición de las piezas.
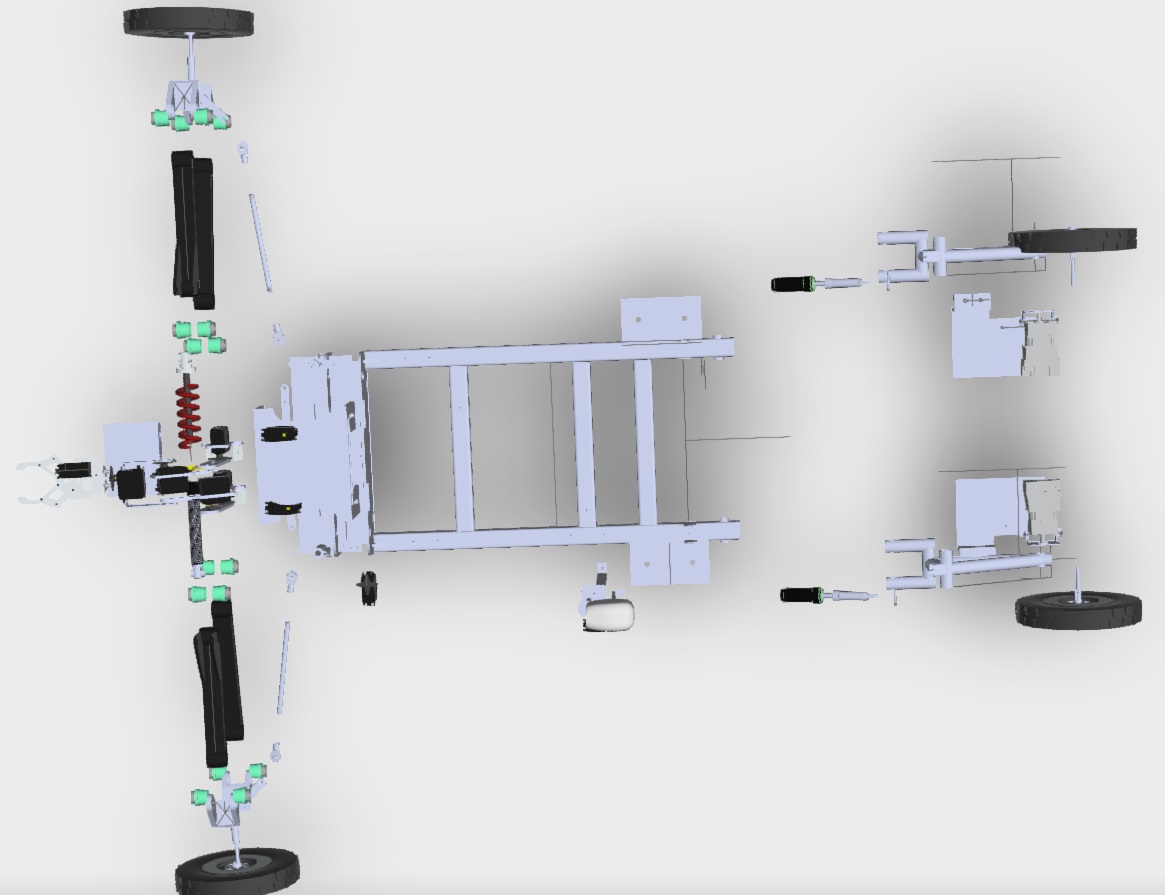
Fig. 6.- Vista superior donde se ve la descomposición de las piezas.
En los siguientes links se pueden descargar los archivos del vehículo base para robots. Son 5 archivos que deben de descomprimirse y colocarse en una carpeta. Eliminar del título de los archivos todo lo que diga “Parte” y el número siguiente, y guardar en carpetas con los mismos nombres.

Para el control por medio de visión por computadora, se puede utilizar el código dejado en le link de abajo. Este código esta diseñado para capturar imagenes de reconocimiento facial, y poder generar una respuesta a través de él.
NOTA: Solo hay que cambiar las direcciones y nombres de las carpetas en donde se trabaja ya que, obviamente, las indicadas en el código son aquellas en las que se diseñó el código.