Diseño y desarrollo de una prótesis tipo mano.
En el mundo, de acuerdo a [1], in 2017 , 57.7 millones de personas presentaban la amputación de algún miembro debido a causas traumáticas, lo que desemboca en que tales personas vean disminuida su calidad de vida y por lo tanto es de gran relevancia el diseño de prótesis que puedan ser ajustables a las situaciones particulares de cada individuo, más aún, es de gran relevancia que estas prótesis sean manipuladas de una forma “natural” y sin complejas instrucciones de control. Para cubrir esta finalidad, se plantea el uso de señales bioeléctricas, particularmente, electromiográficas (EMG), estas señales se presentan en cada instante que un individuo realiza una contracción muscular, lo que implica que un usuario solo necesita reaccionar en la misma forma en la que reaccionaría si tuviera su miembro corporal, y de esta forma la prótesis mecatrónica reacciona en la misma forma que su miembro amputado reaccionaría.
Lo interesante de estas señales es que, aunque aparentemente aleatorias, cada movimiento particular tiene una representación bioeléctrica con un patrón general, patrón que puede ser caracterizado y a partir de tal caracterización, se pueden obtener palabras de control.
Para tratar las señales EMG, es necesario poder tener un rango de trabajo adecuado, es decir, amplificarlas después de haberlas adquirido directamente por medio de un electrodo, ya que su amplitud de manera natural varía desde los μV hasta un bajo rango de mV (menor de 10mV), y de acuerdo a trimedica [2], la energía utilizable de la señal está limitada al rango de frecuencia de 0 a 500 Hz, con la energía dominante en el rango de 50-150 Hz. Las señales utilizables son aquellas con energía por encima del nivel de ruido eléctrico. Por lo descrito, también importante el obtener un sistema sensorial diseñado específicamente para convertir las señales crudas en señales aptas para el procesamiento.
Uno de los principales inconvenientes de un sistema que funcione en respuesta a las señales EMG, es que las características de estas dependerán de diversos factores, tales como la intensidad de la contracción muscular, la posición de los electrodos, el tipo y condición de piel, adicionalmente, también se verán afectadas por las condiciones del sistema de recolección de datos, tal como la calidad del electrodo, el diseño del sensor, el ruido generado por el entorno, etc. Sin embargo, esto puede ser minimizado si se tienen grandes cantidades de información que pertenezcan al dataset de entrenamiento de la red neuronal (RN) que será la encargada de caracterizar las señales EMG.
Las señales EMG han sido utilizadas en diversos experimentos en la literatura científica, por medio de estas señales se han detectado emociones [3], se ha hecho música [4], se ha desarrollado ropa inteligente [5]. En la misma forma, las EMG han sido utilizadas para como elementos de control de brazos robóticos [6], de reproductores de MP3 [7] y teléfonos móviles [8], así como la caracterización de gestos manuales [9]. Esta última aplicación de gran interés para los fines de este artículo.
La clasificación de gestos, o movimientos manuales, es de gran relevancia para los fines de este proyecto, ya que aquí se busca encontrar un sistema que pueda clasificar adecuadamente las señales EMG de un usuario, y a partir de tal clasificación, controlar una prótesis de una mano. Existen diferentes tipos de clasificación descritos en la literatura, sin embargo, algunos de los más comunes son support vector machines [10], random forest [11], son k-nearest neighbors (k-NN) [12], transformada wavelet [13], decision trees [14], lógica difusa [15, 16] y las artificial neural networks [9].
Las redes neuronales artificiales (ANN), han sido un esquema utilizado en diferentes proyectos de clasificación de movimientos de la mano con la intención de generar prótesis “naturales” en su funcionamiento [17, 18, 19]. Para la caracterización de las EMG, se han utilizado señales crudas, pero también, se han utilizado como elementos de entrada, características extraídas de tales señales. ya que, según [20], el éxito de la clasificación de patrones depende completamente de la selección de las características utilizadas para representar a las señales EMG crudas. Para generar los vectores de entrada construidos por características se han utilizado, principalmente, mean absolute value (MAV), variance (VAR), standard deviation (SD), zero crossing (ZC), root mean square (RMS), sin embargo, no son las únicas características utilizadas, existen algunas otras, tales como: waveform length (WL), mean absolute value slope (MAVS), mean frequency (MNF), median frequency (MDF), slope sign change (SSC), root mean square (RMS), integrated EMG (IEMG), wavelet transform (WT) coefficients, and wavelet packet transform (WPT) coefficients, autoregression (AR) coefficients, Willson amplitude (WA), fast Fourier transform (FFT) coefficients, cepstrum coefficients (CC) y short time Fourier transform (STFT) coefficients.
El proyecto descrito, utiliza la extracción de características de la señal cruda EMG. Adicionalmente, se describe todo el proceso de desarrollo para la generación del sensor que obtiene las señales EMG, así como el diseño de los filtros utilizados. El diagrama del sistema completo puede verse en la figura 1.
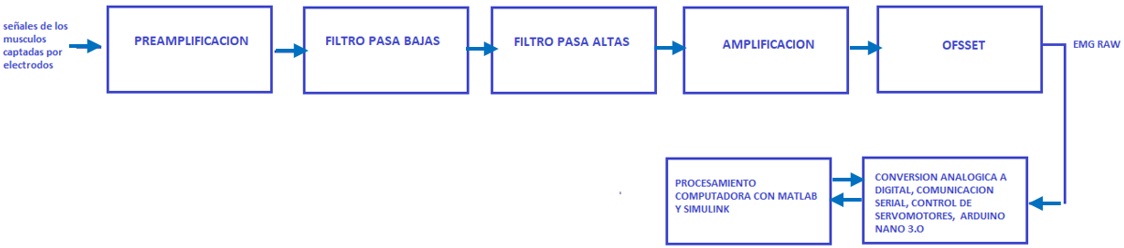
Fig. 1.- Diagrama de bloques del sistema a desarrollar.
Considerando las etapas electrónicas de la figura 1, se diseñó y construyó el circuito mostrado en la figura 2, quedando construido en la forma que se ve en la figura 3.
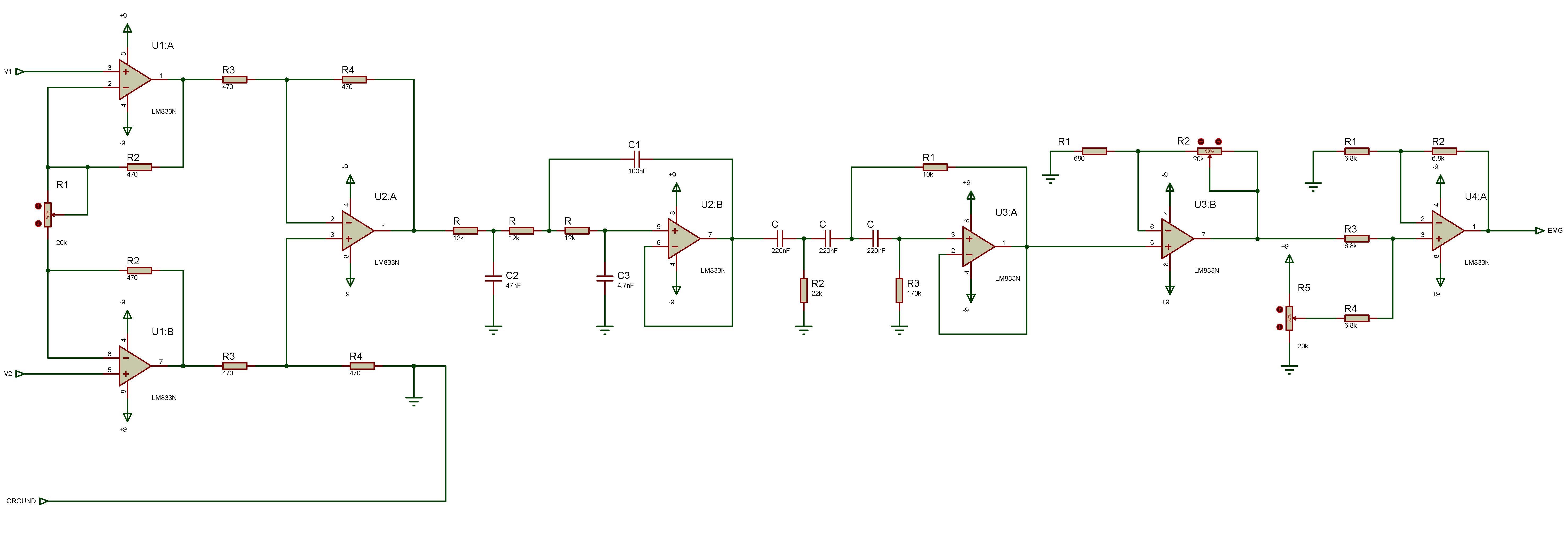
Fig. 2.- Diseño esquemático del circuito diseñado para la toma y procesamiento de señales EMG.
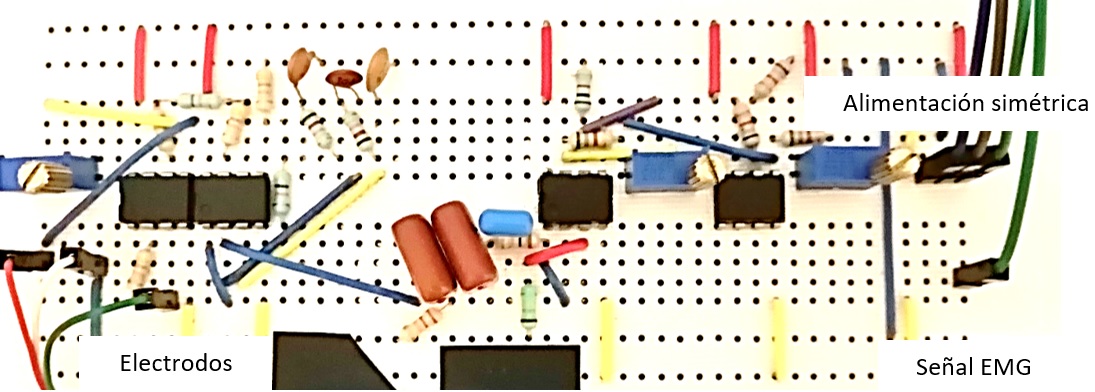
Fig. 3.- Diseño físico del circuito diseñado para la toma y procesamiento de señales EMG.
El funcionamiento básico de esta prótesis está definido por el diagrama de la figura 4, mientras que el esquemático general puede verse en la figura 5. En la cual se puede ver que se toman las señales EMG del brazo de un usuario, estas señales son enviadas a la circuitería de la figura 2, donde se lleva el proceso de adecuación de la señal. Una vez que la señal se ha adecuado pasa a la tarjeta de desarrollo Arduino nano, donde a su vez se transmite a una computadora en donde, por medio del toolbox de machine learning de Matlab, se realiza la clasificación de los movimientos de la mano. Una vez que una red neuronal ha clasificado los movimientos de la mano, ahora cuando el usuario realiza la instrucción de un determinado movimiento, esta instrucción se identifica por medio de la red neuronal y manda la señal de control hacía la prótesis, en la que esta reacciona en la misma forma de la instrucción dada.
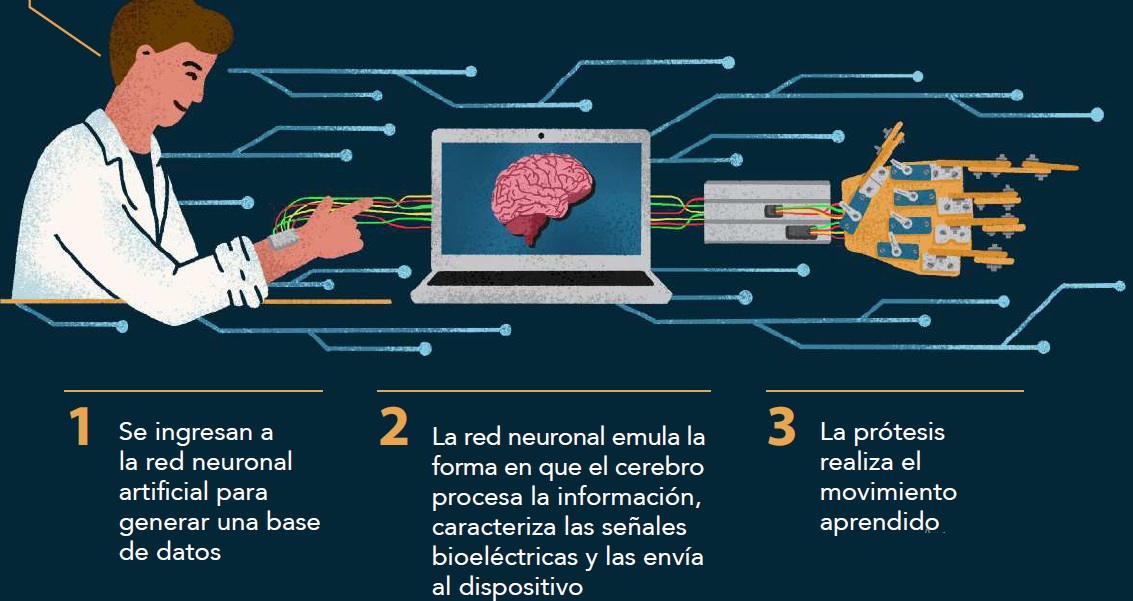
Fig. 4.- Esquema general de funcionamiento del sistema de control de la prótesis tipo mano.
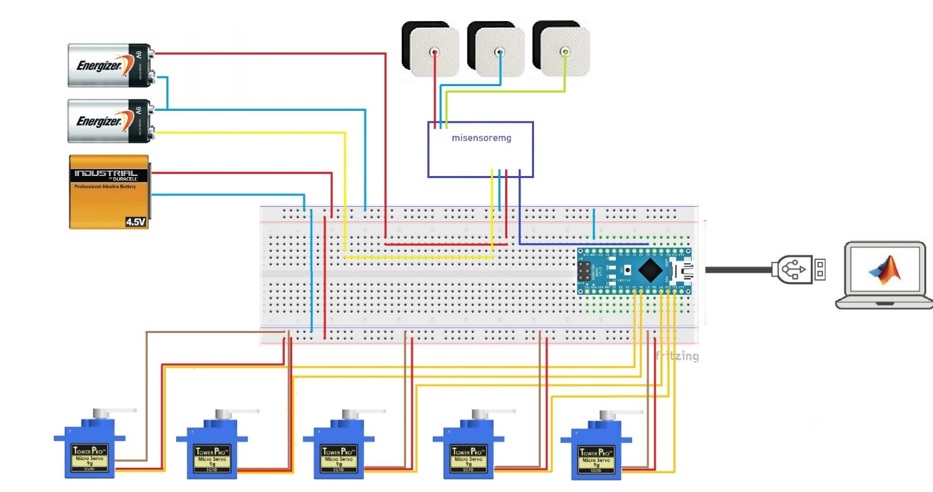
Fig. 5.- Diagrama esquemático del proyecto: Prótesis tipo mano.
La prótesis se puede ver en la figura 6.
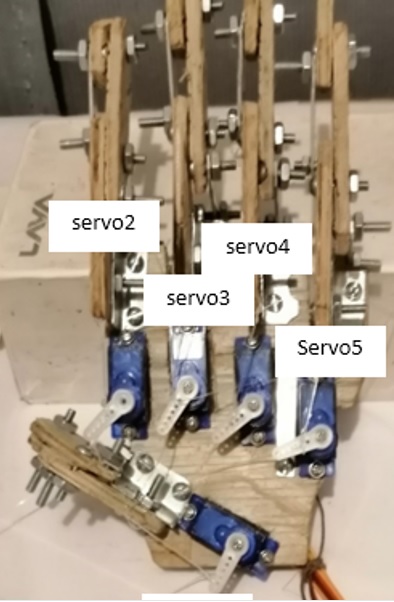
Fig. 6.- Prótesis tipo mano realizada con madera y servomotores.
Para el diseño de este proyecto se requiere una gran cantidad de pormenores, el desarrollo completo y detallado se puede ver en el siguiente link:
https://www.mdpi.com/2072-666X/13/10/1681
Así mismo, con la intención de que pueda replicarse, los scripts se están dejando en el siguiente link de descarga.
http://virtual.cuautitlan.unam.mx/intar/wp-content/uploads/2023/07/codigosprogramas-1.rar
Proyecto realizado con apoyo del PAPIME PE103322.
Referencias
[1] McDonald, C. L., Westcott-McCoy, S., Weaver, M. R., Haagsma, J., & Kartin, D. (2021). Global prevalence of traumatic non-fatal limb amputation. Prosthetics and orthotics international, 0309364620972258.
[2] http://trimedica.es/ELECTROMIOGRAFIA-EMG-DE-SUPERFICIE-DELSYS/La-Senyal-de-EMG-Delsys/
[3] Wagner, J.; Kim, J.; André, E. From physiological signals to emotions: Implementing and comparing selected methods for feature extraction and classification. In Proceedings of the IEEE International Conference on Multimedia and Expo, Amsterdam, Netherlands, 6 July 2005.
[4] Dubost, G.; Tanaka, A. A wireless, networkbased biosensor interface for music. In Proceedings of the ICMC, Gothenburg, Sweden, 16–21 September 2002.
[5] Tröster, G. The Agenda ofWearable Healthcare. Yearb. Med. Inform. 2018, 14, 125–138.
[6] Beau, C.; Kai, M.; Pradeep, S.; Rao, R. Real-Time Classification of Electromyographic Signals for Robotic Control. Available online: http://aaai.org/Papers/AAAI/2005/AAAI05-082.pdf (accessed on 20 April 2019).
[7] Fistre, J.; Tanaka, A. Real Time EMG Gesture Recognition for Consumer Electronics Device Control. Available online: https://www.researchgate.net/publication/247342413_Real_Time_EMG_Gesture_Recognition_for_Consumer_Electronics_Device_Control (accessed on 20 April 2019).
[8]Costanza, E.; Perdomo, A.; Inverso, S.A.; Allen, R. EMG as a Subtle Input Interface for Mobile Computing. In Proceedings of the International Conference on Mobile Human-Computer Interaction, Glasgow, UK, 13–16 September 2004.
[9] Khanna, A.; Muthukumaraswamy, S.A. Cost-e_ective system for the classification of muscular intent using surface electromyography and artificial neural networks. In Proceedings of the International conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017.
[10] Dardas, N.H.; Georganas, N.D. Real-time hand gesture detection and recognition using bag-of-features and support vector machine techniques. IEEE Trans. Instrum. Meas. 2011, 60, 3592–3607. [CrossRef]
[11] Sangjun, O.; Mallipeddi, R.; Lee, M. Real Time Hand Gesture Recognition Using Random Forest and Linear Discriminant Analysis. In Proceedings of the 3rd International Conference on Human-Agent Interaction, Daegu, Korea, 21–24 October 2015; pp. 279–282.
[12] Benalcazar, M.E.; Jaramillo, A.G.; Zea, A.; Paez, A.; Andaluz, V.H. Hand gesture recognition using machine learning and the Myo armband. In Proceedings of the European Signal Processing Conference, Kos, Greece, 28 August–2 September 2017; pp. 1075–1079.
[13] I. Haider, M. Shahbaz, M. Abdullah, and M. Nazim, “Feature extraction for identification of extension and flexion movement of wrist using EMG signals,” Canadian Conference on Electrical and Computer Engineering, pp. 792-795, 2015.
[14] Joshi, A.; Monnier, C.; Betke, M.; Sclaroff, S. Comparing random forest approaches to segmenting and classifying gestures. Image Vis. Comput. 2017, 58, 86–95. [CrossRef]
[15] M. Khezri, M. Jahed, and N. Sadati, “Neuro-fuzzy surface EMG pattern recognition for multifunctional hand prosthesis control,” Industrial Electronics, 2007. ISIE 2007. IEEE International Symposium on, 2007, pp. 269–274.
[16] F. Chan, Yong-Sheng Yang, F. Lam, Yuan-Ting Zhang, and P. Parker, “Fuzzy EMG classification for prosthesis control,” Rehabilitation Engineering, IEEE Transactions on, vol. 8, 2000, pp. 305-311.
[17] G. Gini, M. Arvetti, I. Somlai, and M. Folgheraiter, “Acquisition and Analysis of EMG Signals to Recognize Multiple Hand Movements for Prosthetic Applications,” Applied Bionics and Biomechanics, vol. 9, no. 2, pp. 145–155, 2012.
[18] S. A. Raurale, “Acquisition of EMG signals to recognize multiple Hand Gestures for Prosthesis Robotic Hand-A Review,” Int. J. Curr. Eng. Technol., pp. 65-70, 2014.
[19] Rami J. Oweis, Remal Rihani, Afnan Alkhawaja, “ANN-based EMG classification for myoelectric control,” International Journal of Medical Engineering and Informatics, Vol 6, Issue 4, pp. 365, 2014.
[20] B. Hudgins, P. Parker, and R. Scott, “A new strategy for multifunction myoelectric control,” Biomedical Engineering, IEEE Transactions on, vol. 40, 1993, pp. 82-94.