Prótesis de extremidad delantera canina
La salud animal es de gran relevancia en un mundo moderno y consciente del sufrimiento que todo ser vivo siente por enfermedad ó, en este caso, perdida de un miembro corporal. Es necesario garantizar que un ser vivo, en este caso un can, pueda tener una calidad de vida adecuada, y que su esencia no se vea menguada por algún malestar que puede ser tratado.
El aspecto motriz es sumamente importante para la medicina veterinaria y la salud general de un perro, en este aspecto, obviamente, se ven involucradas las cuatro extremidades del can. Siendo que estas pueden sufrir traumatismos superficiales en algún momento por diversas causas, es importante considerar que estos traumatismos pueden provocar en él alguna hemorragia, infección o algún carcinoma que termine en una desafortunada amputación.
La amputación, en términos médicos, es una extirpación de una parte del cuerpo que se encuentre dañada y cuyo daño comprometa la salud general del animal. Los procedimientos más comunes respecto a esta intervención quirúrgica son el corte de la zona afectada y la desarticulación de la región donde el daño se desarrolla. Es decir, se puede cortar de tajo la zona o ubicar la región de la extremidad y extirpar la parte que se encuentre bajo una articulación.
Un perro puede llevar una vida normal con únicamente tres de sus extremidades, o incluso dos y ser tratado con una silla de ruedas que supla en ciertos aspectos el movimiento que sus miembros amputados le otorgaban.
La problemática se presenta cuando el estado de cojera decae en problemas óseos en la extremidad de soporte al intentar caminar o trotar, provocando que su centro de gravedad, sobre la misma columna, cambie abruptamente causando daños en esta parte del cuerpo, parte sumamente delicada. La medicina veterinaria moderna, propone a los dueños como solución el implemento de prostéticos mecánicos que suplan la o las extremidades perdidas.
En México las prótesis mecánicas para miembro torácico son escasas pues son pocas las organizaciones que realizan este tipo de prostético, y aún al día de hoy, con costes entre $1,350 y 1,750 dólares.
Esta introducción fue obtenida del artículo [1], generado a partir del desarrollo del proyecto.
Este proyecto se enfoca en el desarrollo de una prótesis de extremidad derecha canina implementada sobre un can de nombre Milo, el cual ha perdido la extremidad delantera derecha, figura 1. La prótesis utiliza un controlador difuso para tratar de imitar el caminar natural de un perro y no que sea solo un elemento estético y de esta forma mejorar su calidad de vida.
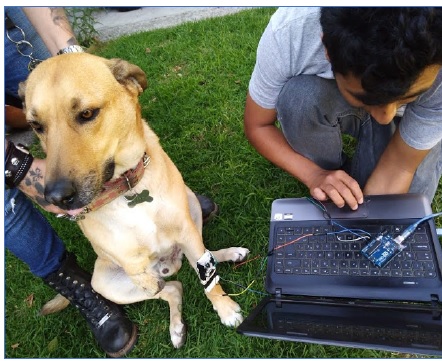
Fig. 1.- Milo, can que se tomo como modelo para realizar las pruebas de diseño de la prótesis.
Diseño del sistema
El desarrollo del sistema constó de varias secciones, la sección del diseño mecánico de movimiento, el diseño electrónico del controlador, el controlador difuso y la fabricación por medio de impresión 3D del modelo realizado.
por medio de software CAD se generó un diseño mecánico que puede verse en la figura 2.
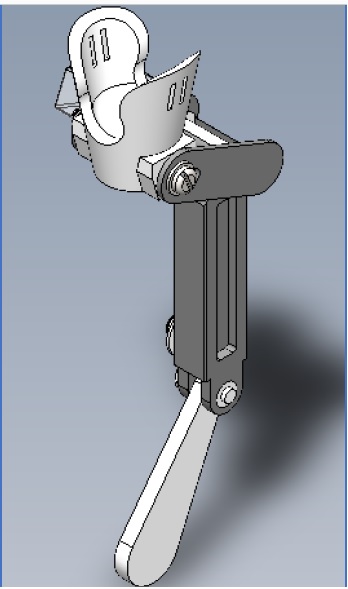
Fig. 2.- Prótesis mecánica diseñada por medio de CAD.
Obviamente, un sistema mecánico debe de ser revisado y calculado de tal forma que presente diferentes características de funcionamiento, tales como estabilidad, fortaleza, resistencia, etc. Se realizaron diferentes pruebas a las piezas diseñadas, con la intención de tener un sistema mecánico fiable y robusto, esto se puede ver en las figuras 3 a 5.
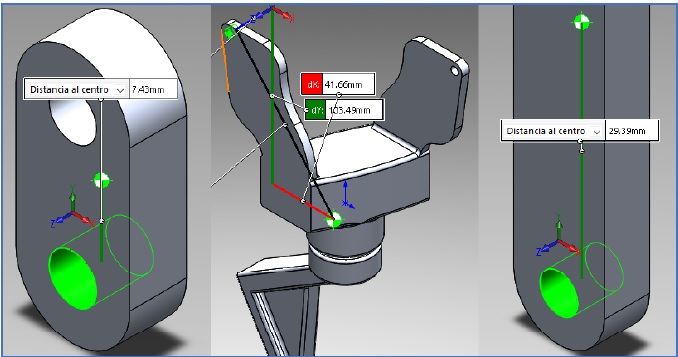
Fig. 3.- Calculo y verificación de los centros de gravedad de las piezas mecánicas.
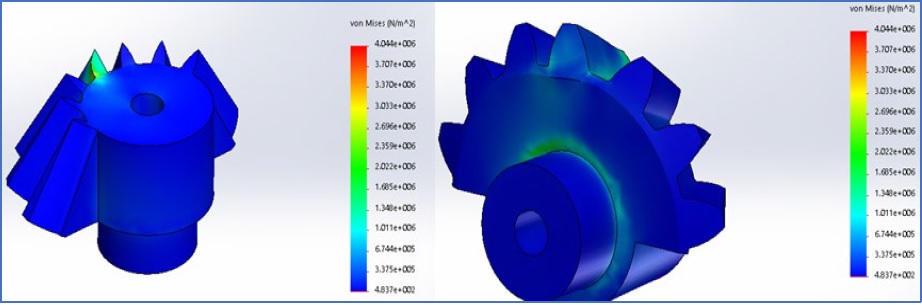
Fig. 4.- Cálculo de desplazamientos y tensiones del engranaje de control.
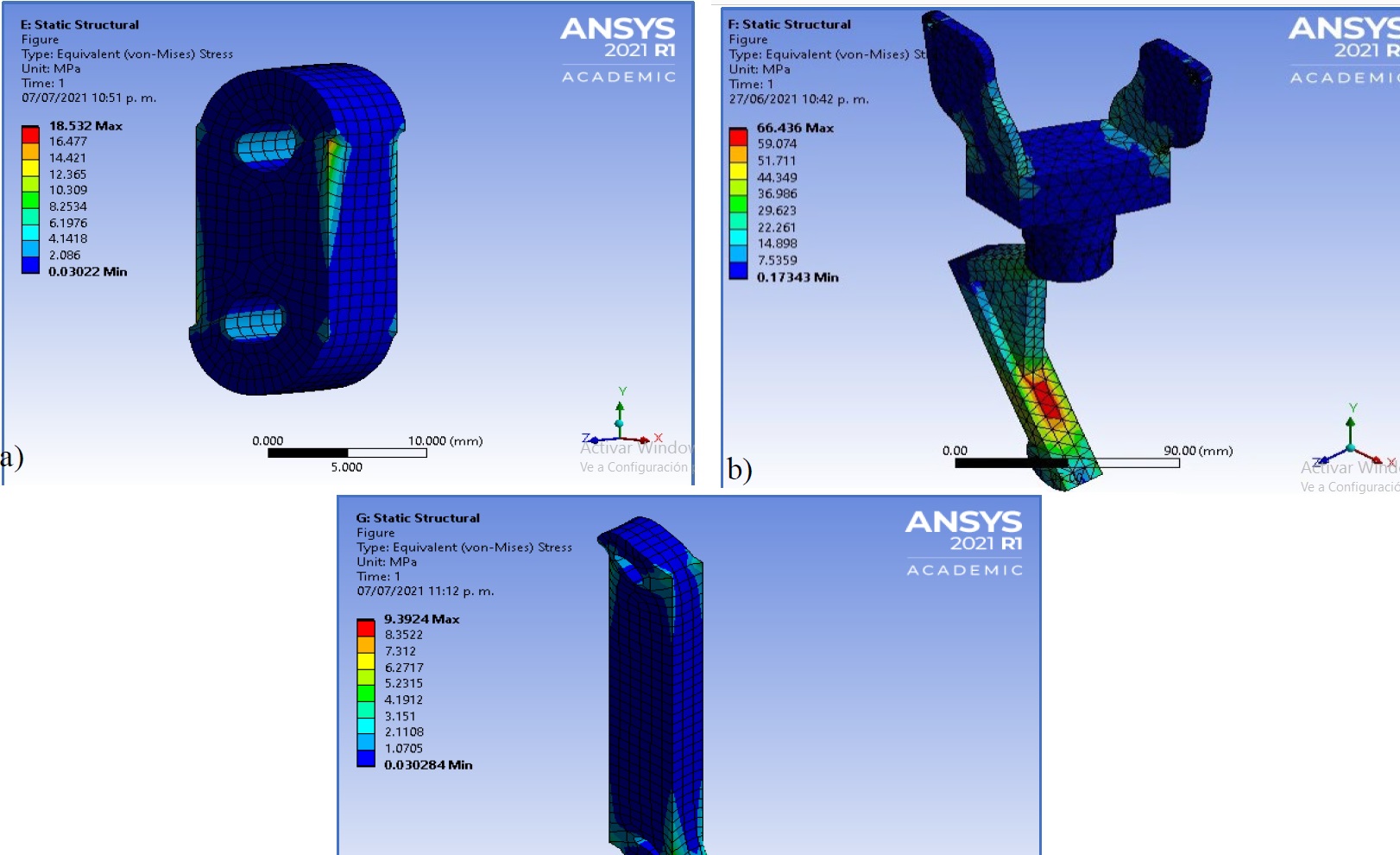
Fig. 5.- Análisis de esfuerzos y optimización topológica de las piezas mecánicas.
Una vez realizado el diseño mecánico, es necesario realizar el diseño de los sistemas embebidos que serán el control electrónico de la prótesis, para este fin se realizaron dos sistemas electrónicos, uno de ellos que capta el movimiento de la pata sana del perro por medio de un acelerómetro, y el segundo de ellos que recibe la información del primero, la procesa, y decide como reaccionar, emulando el movimiento natural de un perro. La transmisión se realiza por medio de Bluetooth. Este proceso se puede ver en las figuras 6 a 10.
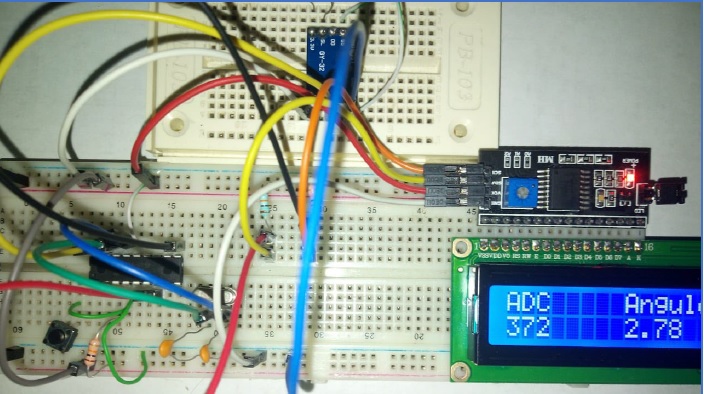
Fig. 6.- Pruebas del sistema con el acelerómetro, caracterización y diseño de funcionamiento.
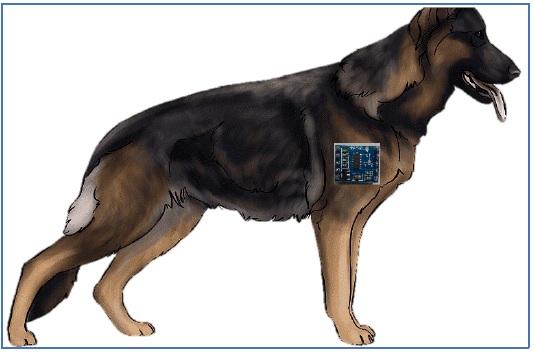
Fig. 7.- Posición del acelerómetro en el perro, para identificar los movimientos del mismo.
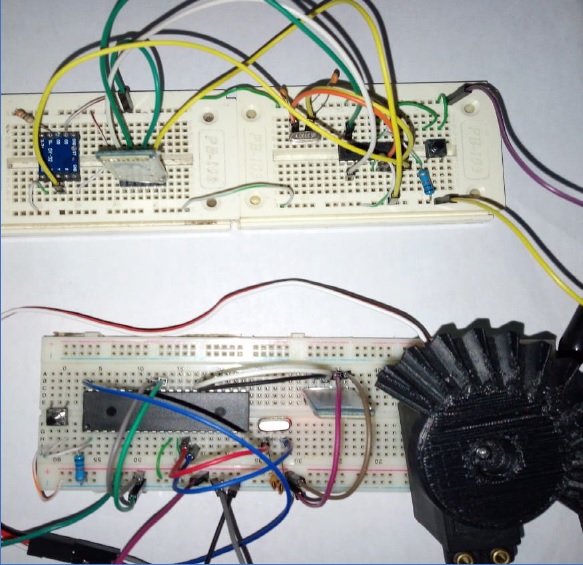
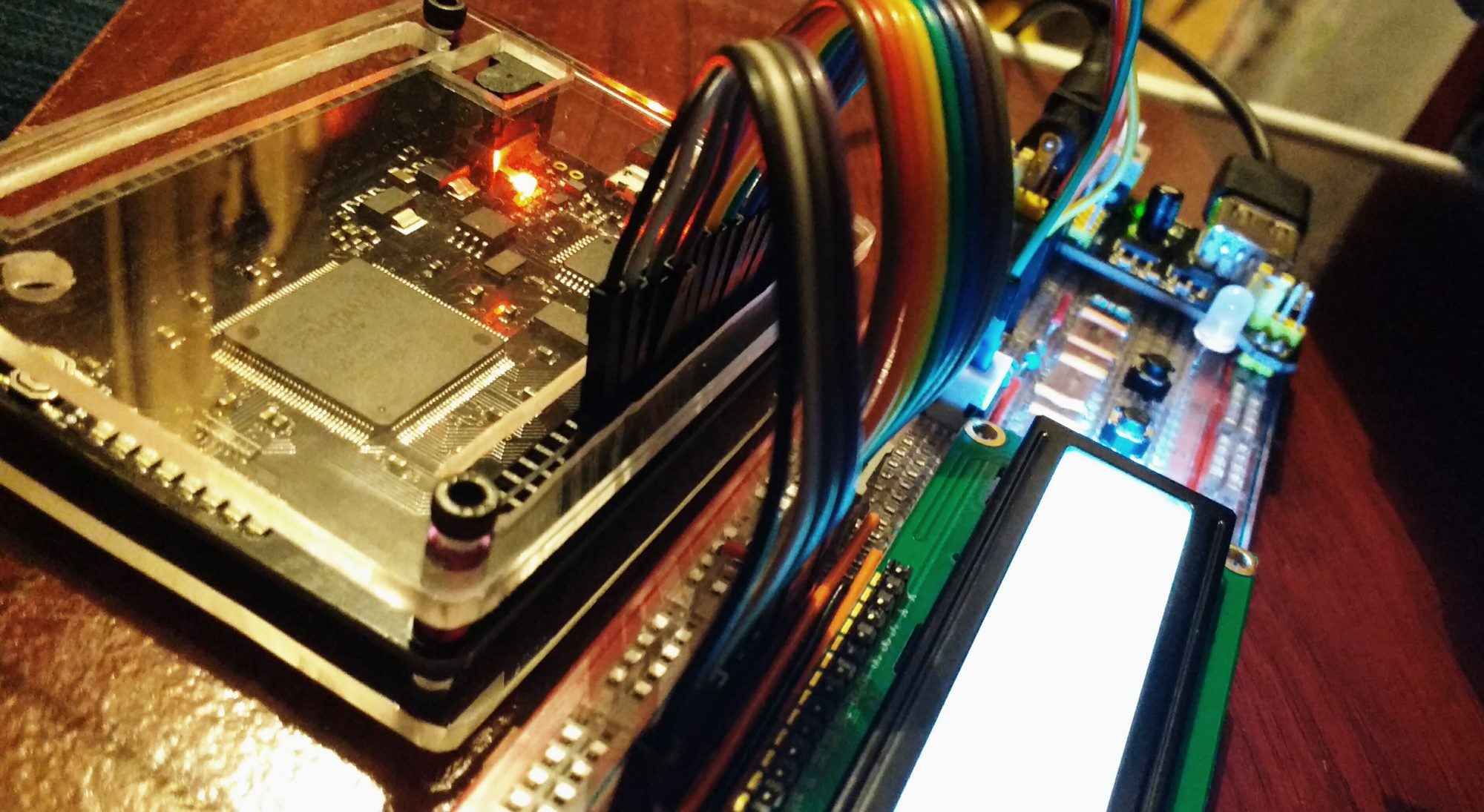
Fig. 8.- Diseño y prueba de los circuitos emisor y receptor, en los que se puede observar el engrane que será controlado para realizar el movimiento de la prótesis.
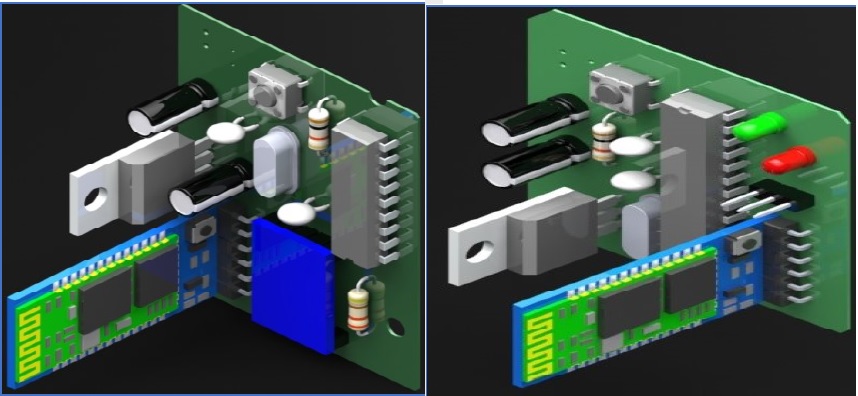
Fig. 9.- Diseño en 3D de las placas fenólicas diseñadas para la realización de los sistemas embebidos que estarán en la prótesis.

Fig. 10.- Sistemas embebidos ya colocados dentro de la caja de instrumentación de la prótesis.
Como ya se ha mencionado, el control de movimiento se lleva a cabo por medio de un controlador difuso, es decir, el controlador difuso recibe el movimiento de la pata sana, y de esta forma calcula el movimiento que debe de realizar la prótesis, para buscar el funcionamiento natural de la misma. El controlador difuso se puede observar en la figura 11.
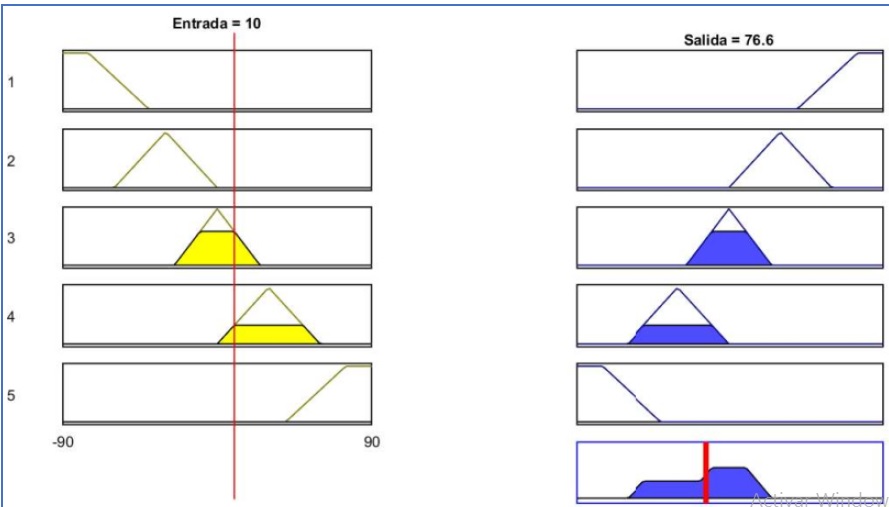
Fig. 11.- Controlador difuso para mover el engrane.
El proceso, aunque simplificado en esta página, es un proceso que conlleva muchos cálculos y diseño, los cuales fueron plasmados de manera detallada en la tesis obtenida a partir de este proyecto, la cual puede ser revisada en el siguiente link de TESIUNAM:
http://132.248.9.195/ptd2022/agosto/0828949/Index.html
Con la intención de que pueda ser replicada, en los siguientes links se dejan los archivos de trabajo para que los estudiantes puedan revisarlos, modificarlos y adecuarlos a sus necesidades:
http://virtual.cuautitlan.unam.mx/intar/wp-content/uploads/2023/07/ANALISIS-EN-ANSYS-WORKBENCH.rar
http://virtual.cuautitlan.unam.mx/intar/wp-content/uploads/2023/07/DISENOS-EN-AUTOCAD.rar
http://virtual.cuautitlan.unam.mx/intar/wp-content/uploads/2023/07/ARCHIVOS-MATLAB.rar
http://virtual.cuautitlan.unam.mx/intar/wp-content/uploads/2023/07/PROGRAMAS-EN-C-Y-XFUZZY.rar
Referencias
[1] de Jesús García-Velázquez, E., López-Miranda, E. G., Tinoco-Varela, D., & Cruz-Morales, R. D. Control difuso para la mimetización del movimiento de un prototipo de prótesis de una extremidad canina.