
Robótica, una muy breve historia

Fig. 1.- Robot, imagen recuperada de https://pixabay.com/es/photos/robot-maquinaria-android-ai-4757878/
La robótica se ha desarrollado por dos situaciones principales, por un lado la necesidad de delegar actividades que son de riesgo o complicadas de realizar por las personas, y por el otro, una necesidad humana de dotar de características antropomórficas a los objetos, esta situación altamente explotada en películas y entretenimiento relacionado a la ciencia ficción.
Se podría creer que la robótica es una rama de la ciencia relativamente nueva, sin embargo, si consideramos a sus ancestros, los autómatas, podemos darnos cuenta que su historia va más allá de la era contemporánea.
Distintas civilizaciones antiguas desarrollaron diversos mecanismos tecnológicos que han sido nombrados como autómatas (Del latín automăta, y este a su vez del griego αὐτόματα autómata ‘ingenios mecánicos’; propiamente ‘espontáneos, que obran por sí mismos’, DRAE), entre los cuales podemos mencionar:
- La máquina lavamanos de Filón de Bizancio diseñada en el siglo III A.C., este dispositivo a pesar de su sencillez, presentaba un sistema tecnológico avanzado. Principalmente colocados en la entrada de los templos religiosos, era utilizado para que los visitantes se purificaran antes de entrar al recinto sagrado, estos ingresaban una moneda y la máquina devolvía una pequeña porción de jabón así como agua para lavarse y purificarse.
- Detector de terremotos de Zhang Heng, diseñado en el siglo II. Este ingenioso dispositivo chino señalaba la dirección en la cual se localizaba el epicentro de un movimiento telúrico, Escrig, A. (2014) describe le funcionamiento de tal aparato en la siguiente manera:
Constaba de un recipiente con ocho salidas -con forma de boca de dragón- en la parte superior. Dentro moraba un péndulo invertido en posición vertical. Cuando aparecía una onda sísmica la punta del péndulo se desplazaba y accionaba uno de los ocho deslizantes, que a su vez desplazaban una bola que, por efecto de la gravedad, caía a través de uno de los ocho caminos hacia la boca de unos sapos situados en la parte inferior. Dependiendo por donde había salido la bola se detectaba la dirección del epicentro.
Este dispositivo puede verse en la figura 2.

Fig. 2.- Detector de terremotos de Zhang Heng. Imagen recuperada de https://commons.wikimedia.org/wiki/File:EastHanSeismograph.JPG
- León robot de Leonardo da Vinci, desarrollado a petición del Rey Francisco I en el año 1515. Este león podía caminar de forma autónoma, mover la cabeza y la cola, se dice (aunque hay diferentes versiones, modificadas ligeramente de la misma historia) que el león se le acercó al rey, este golpeó al león mecánico con su látigo, y en ese momento el pecho del león se abrió y reveló una flor de lis, emblema de la monarquía francesa.
- Autómatas “más contemporáneos”, pero con una fascinante construcción mecánica, son los conocidos como la pianista, el dibujante y el escritor, diseñados por Pierre Jaquet-Droz entre 1768 y 1774. Estas piezas fueron fruto del conocimiento que Pierre tenía de la relojería, y los sistemas de engranaje. El dibujante, que fue construido con aproximadamente 2000 piezas, tenía la forma de un niño que dibuja sobre un papel, movía los ojos conforme dibujaba, e incluso podía soplar para eliminar los restos de grafito de la hoja. Este autómata se puede considerar programable, ya que podía elegir que dibujo realizar, en su “programación” se tenían los dibujos de un retrato de Luis XV, una pareja real, un perro con la frase Mon toutou (‘mi perro’) escrita a un lado, y a Cupido subido a una carroza tirada por una mariposa. Por otro lado, la pianista, la cual estaba representada por una mujer que toca un instrumento musical, su diseño permite que pueda dirigir la mirada hacia las teclas de su instrumento, mecer el cuerpo mientras toca, e incluso puede inclinar la cabeza a modo de reverencia cuando finaliza una pieza. Y por último, el más complejo de ellos, El escritor, realizado con aproximadamente 6000 piezas, este autómata tiene la capacidad de escribir sobre papel, incluyendo el acto de mojar la pluma en el tintero y sacudirla para evitar manchar el papel sobre el que escribe, uno de sus rasgos más característicos es que sigue con la mirada las líneas que va escribiendo. Estos autómatas pueden verse en la figura 3.

Fig.3 .- Autómatas de Pierre Jaquet-Droz, el dibujante, la pianista y el escritor.
- Una mención especial se la lleva Herón de Alejandría, quién escribió el primer libro relacionado a robótica: Los autómatas (Αυτοματοποιητική). Él, a lo largo de su vida (año 10-70 d. C.) diseñó diversos artefactos automatizados que presentaba de forma pública, con los cuales impresionaba a los observadores. Dentro de sus autómatas más representativos se encuentran el teatro de figuras mecánicas, que tal como su nombre lo indica, fue un teatro automatizado que representaba una historia con personajes y situaciones interpretadas completamente por marionetas “programadas” para llevar a cabo la función, todo esto por medio de un complejo sistema de engranes; Por otro lado, también se tiene documentado el diseño de puertas automáticas, sistema principalmente utilizado en templos religiosos, de esta manera se daba la impresión de que las puertas se abrían por intervención divina, un dato interesante es que este sistema basaba su comportamiento en máquinas de vapor, el esquema puede verse en la figura 4.

Fig. 4.- Esquema de funcionamiento de las puertas automáticas de Herón. Imagen recuperada de http://www.curistoria.com/wp-content/uploads/2019/02/HeroCC81ndeAlejandriCC81aylagenialideadelaspuertasautomaCC81ticas.jpg
Obviamente, los autómatas mencionados son solo unos cuantos del gran catálogo de sistemas diseñados en la antigüedad, sin embargo sólo son mencionados a modo de ejemplificación, a pesar de la existencia de estos autómatas desde hace siglos, la palabra robot fue utilizada por primera vez en el libro R.U.R. (Rossum’s Universal Robots) de Karel Čapek en 1921. En el libro, se describían a los robots como una especie de humanos que se construían artificialmente y que estaban destinados a realizar las tareas más desagradables para las personas. La palabra Robot se genera a partir de la palabra checa “robota“, que significa “esclavo”.
Fue en 1961 cuando se instaló el primer robot industrial, y por su puesto contemporáneo, en una cadena de montaje de General Motors en la Inland Fisher Guide Plant en Ewing (Nueva Jersey), y a pesar de la incertidumbre que la idea de colocar robots en las líneas de ensamblaje generaba, muy pronto diferentes empresas comenzaron a utilizarlos para mejorar su producción. Los robots comenzaron rápidamente a llamar la atención, no solo de forma industrial sino que se empezaron a implementar en otro tipo de aplicaciones, tal como la exploración espacial (Bogue, 2012), o incluso para la prestación de servicios (Murphy et al., 2019).
Obviamente, el desarrollo de la robótica se ha auxiliado de otros elementos tales como el uso del silicio en componentes electrónicos, y por ende la miniaturización de los mismos, el desarrollo de las microprocesadores y las computadoras, los lenguajes de programación y más recientemente las implementaciones de la inteligencia artificial en los mismos.
En el ámbito industrial, los robots fueron parte activa y significativa de la denominada 3ra. Revolución industrial. En este periodo los robots dejaron de ser simples autómatas eléctricos, para convertirse en elementos que podían ser programados, que contaban con computadoras embebidas, y a la vez podían comunicarse con computadoras externas, es decir, utilizaban las TICs y los avances tecnológicos y algorítmicos para ser más flexibles en su funcionamiento, los robots industriales de morfología más representativa puede verse en la figura 5.

Fig. 5.- Robots industriales en una línea de ensamblaje. Imagen recuperada de https://commons.wikimedia.org/wiki/File:Industrial-robots.jpg
En la década de los 2010’s surge la llamada industria 4.0, una particularización del Internet de las Cosas, y con ella los nuevos esquemas industriales y de manufactura. La industria 4.0, o 4ta. Revolución industrial, es un esquema en el cual los elementos que componen un sistema de producción, se pueden conectar a internet, y en la misma vía, se pueden conectar entre ellos y transmitirse información del proceso de producción. En este punto los robots industriales, y no industriales, deben ser dispositivos que puedan tener acceso a la nube y poder recopilar y transmitir grandes volúmenes de información, más aun, estos robots deben de tener la capacidad de poder “tomar decisiones” independientes de acuerdo a lo que sucede en su entorno, entorno analizado por medio de redes de sensores, es decir, deben de presentar un nivel de inteligencia artificial.
Los robots modernos deben de tener las características mencionadas en el párrafo anterior, ya que actualmente son una parte activa dentro del mundo de información y comunicación en el que nos vemos inmersos, las generaciones anteriores de robot respondían a una orden del operador, o estaban condenados a una repetición incansable de la ejecución de las instrucciones que le indicaba su programación, sin embargo, hoy en día los robots tienen la característica de reaccionar a su entorno, y poder tomar decisiones en base a la comunicación que tienen con otros robots.
En la actualidad, no solamente se han desarrollado los robots inteligentes, sino que se ha buscado que los mismos puedan resolver problemas que máquinas anteriores no puedan solucionar, partiendo de esta situación, se ha planteado la generación de la robótica suave (Kim et al., 2013), ver figura 6.
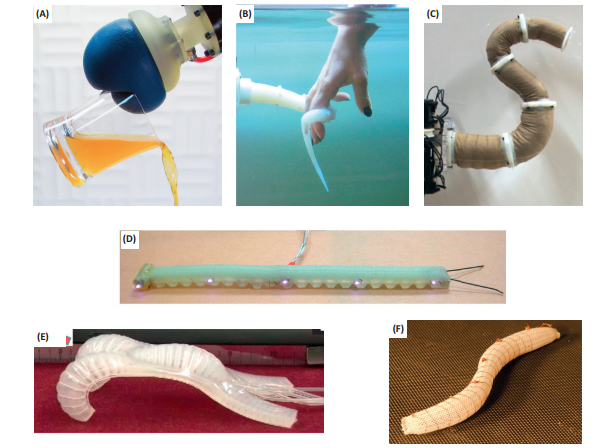
Fig. 6.- Algunos ejemplos de robótica suave, imagen recuperada de (Kim et al., 2013).
La robótica suave busca generar robots desarrollados a partir de materiales que puedan simular los tejidos de seres vivos y que estos puedan ser más flexibles que un robot convencional por medio de la eliminación de los llamados grados de libertad (GDL). A diferencia de un robot convencional que tiene limitada su flexibilidad de acción en función de los GDL, la robótica suave puede generar robots con la consistencia, forma, y manera de actuar de elementos biológicos, tal como los tentáculos de un pulpo, eliminado el concepto de GDL, tal como lo conocemos. Aunado a esto, este esquema busca poder generar robots, o dispositivos, que puedan suplir miembros u órganos humanos de una forma más natural, por ejemplo mediante la generación de corazones artificiales suaves. Para más detalles sobre esta robótica, visitar la página de Harvard https://biodesign.seas.harvard.edu/soft-robotics
La historia de la robótica es sumamente amplia, y de hecho, sería necesario un libro completo para poder tocar todos y cada uno de los elementos que la han ido construyendo, no sólo eso, la robótica se ha hecho tan amplia que actualmente es sumamente difícil poder clasificar los robots en una única manera tal como clasificación por aplicación, por función, por funcionamiento, por morfología, de entretenimiento, etc.
Lejos han quedado los días en los que los robots solo formaban parte de un sector humano muy especializado y en el que, para el resto de la población, sólo existían en libros o películas de ciencia ficción; estos se han ido volviendo elementos cotidianos en nuestras vidas, hoy en día, podemos encontrar robots en prácticamente cualquier ámbito, en el industrial (Ji & Wang, 2019), en el educativo (Ospennikova et al., 2015), en el agrario (Santos et al., 2020), en la hotelería (Nam et al., 2020), e incluso en ámbitos lúdicos (Lee & Jung, 2020). Algunas de las funciones que realizan los robots, pueden verse en la figura 7.
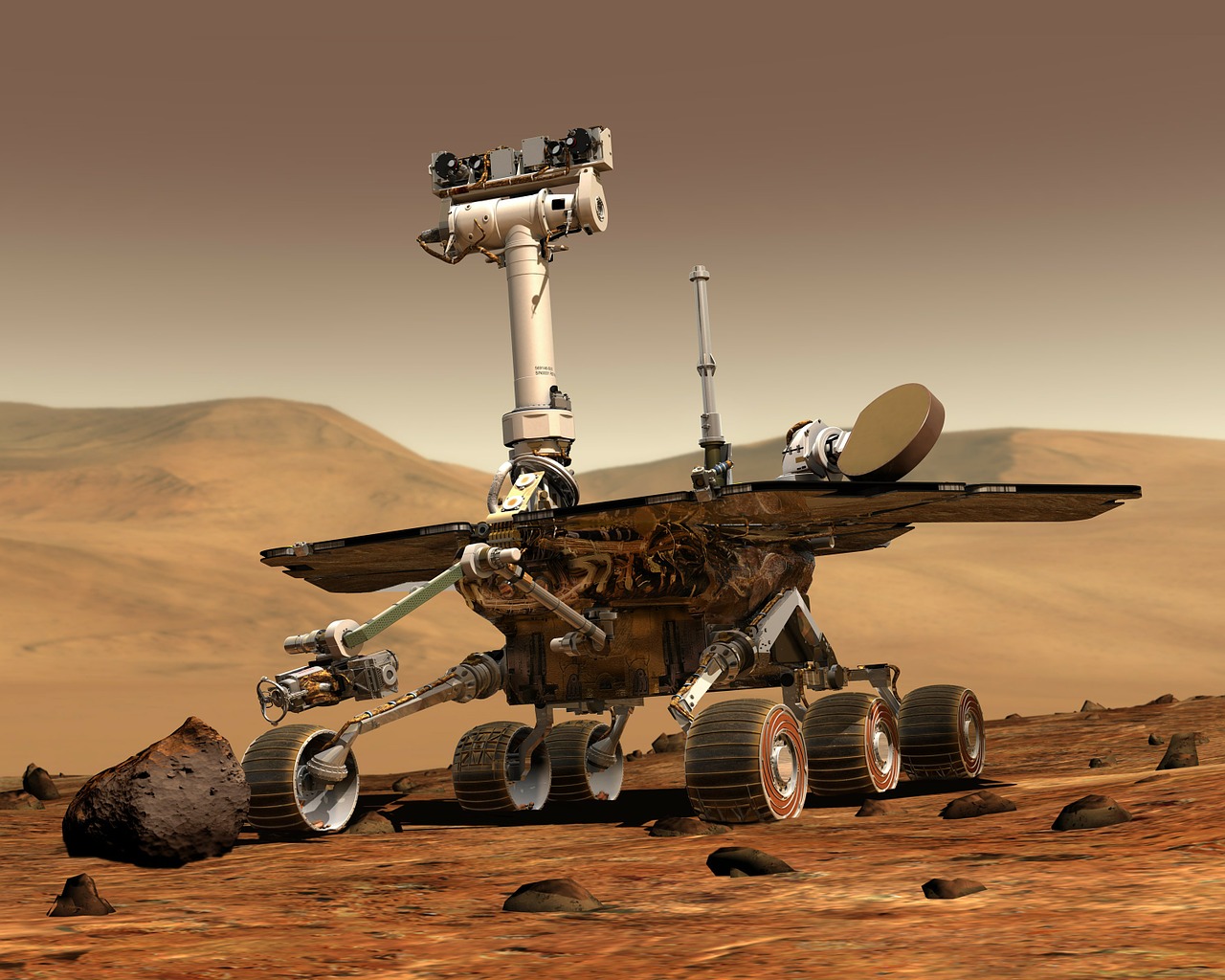
a)

b)
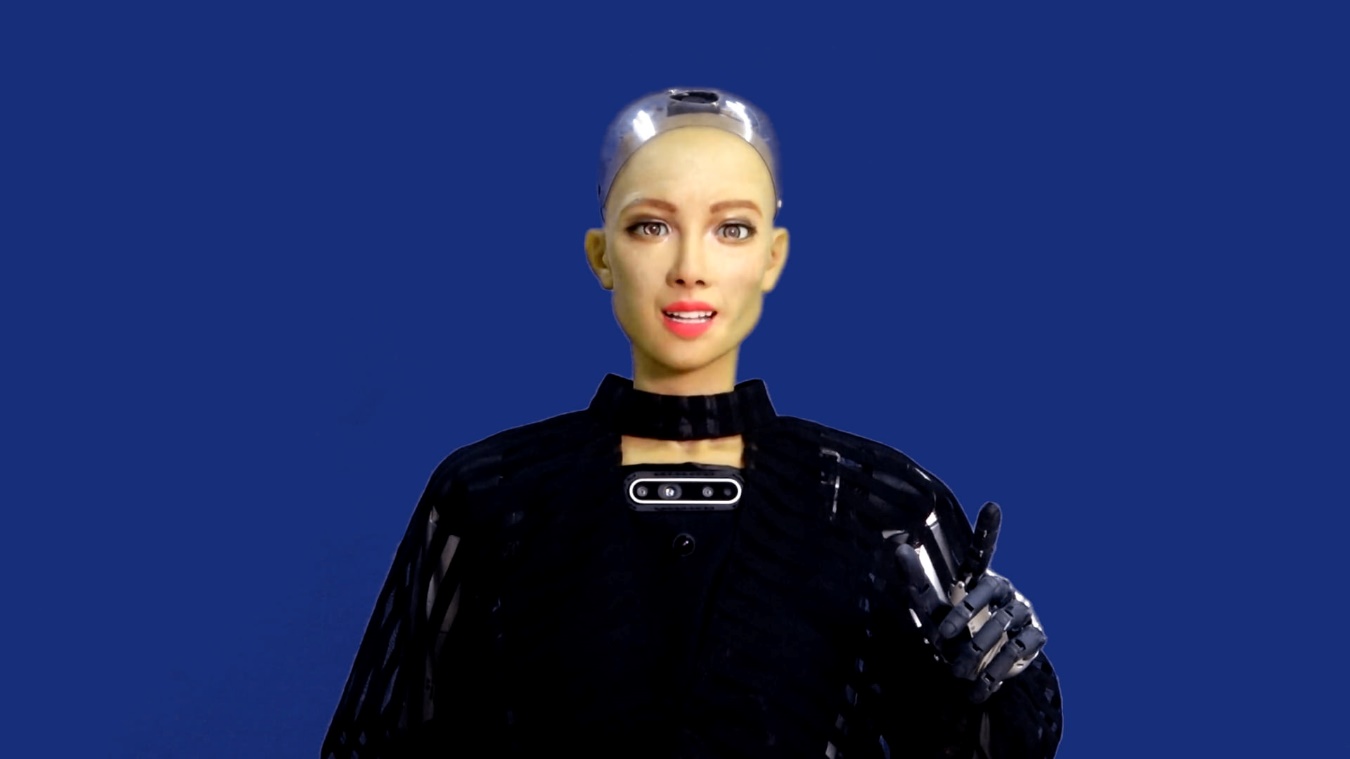
c)

d)
Fig. 7.- Diferentes robots utilizados en diferentes tareas. a) Robot para exploración espacial (https://pixabay.com/es/photos/marte-mars-rover-67522/), b) Robot de entretenimiento ASIMO de Honda (https://commons.wikimedia.org/wiki/File:ASIMO_4.28.11.jpg), c) Robot humanoide SOPHIA, imagen extraída de su cuenta de Facebook, d) Robot repartidor de Amazon.
{kind=link}
NOTA: Para aprender un poco más acerca de los autómatas en la antigüedad, se puede ver el documental de History Channel “Descubrimientos Antiguos – Robots de la antigüedad”, y NO, no contiene Aliens.
Referencias
Bogue, R. (2012). Robots for space exploration. Industrial Robot: An International Journal.
Escrig, A. (2014). El Reloj Milagroso y otras historias científicas sobre robótica, automática y máquinas prodigiosas. Guadalmazán
Ji, W., & Wang, L. (2019). Industrial robotic machining: a review. The International Journal of Advanced Manufacturing Technology, 103(1), 1239-1255.
Kim, S., Laschi, C., & Trimmer, B. (2013). Soft robotics: a bioinspired evolution in robotics. Trends in biotechnology, 31(5), 287-294.
Lee, W. Y., & Jung, M. (2020, March). Ludic-HRI: Designing Playful Experiences with Robots. In Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction (pp. 582-584).
Murphy, J., Gretzel, U., & Pesonen, J. (2019). Marketing robot services in hospitality and tourism: the role of anthropomorphism. Journal of Travel & Tourism Marketing, 36(7), 784-795.
Nam, K., Dutt, C. S., Chathoth, P., Daghfous, A., & Khan, M. S. (2020). The adoption of artificial intelligence and robotics in the hotel industry: Prospects and challenges. Electronic Markets, 1-22.
Ospennikova, E., Ershov, M., & Iljin, I. (2015). Educational robotics as an inovative educational technology. Procedia-Social and Behavioral Sciences, 214, 18-26.
Santos, L. C., Santos, F. N., Pires, E. S., Valente, A., Costa, P., & Magalhães, S. (2020, April). Path planning for ground robots in agriculture: A short review. In 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC) (pp. 61-66). IEEE.